






人类又一次赢了无人驾驶赛车,AI 想攻占街道赛?还太嫩了
经历了一年多的揣测后,刚从 F1 赛场上退役不久的马萨宣布将在 2018/19 赛季重返赛道。这一次,他把目光投向了一个新的战场——Formula E 电动方程式锦标赛。据报道,马萨已经与 Venturi 车队签了 3 个赛季的合约。

对于马萨来说,加入 Formula E 是一个非常不错的「后 F1 生涯新工作」。作为一个新赛事,Formula E 的赛制和竞争氛围都要比 F1 更纯粹,奥迪、DS、捷豹、奔驰、保时捷等传统大厂的先后加入,即将让 Formula E 的竞争水平提升到新的高度。
奔跑在 F1 赛场上的车手就像是大型外企里拿着高薪的高管,Formula E 更像是一家互联网创业公司,为加入其中的车手、车厂提供赛车的新机遇。
今天董车会的故事主角不是 Formula E,也不是马萨,而是一直得到国际汽联关照,有独占 Formula E 赛道大权的新赛事 Roborace。在 2017/18 赛季,这个致力于让赛车自己跑赛道的技术团队已经先后举办了两场小规模计时赛,迈出了从单纯研发到举办比赛的第一步。

这些计时赛可以说是毫无悬念却也特别有趣,因为它的目标是让人类与自动驾驶赛车一决高下。
赢不了女记者和漂移车手的自动驾驶赛车
Roborace 正式成为一场公开比赛的那天,赛道上的赛车将会长这个样子:

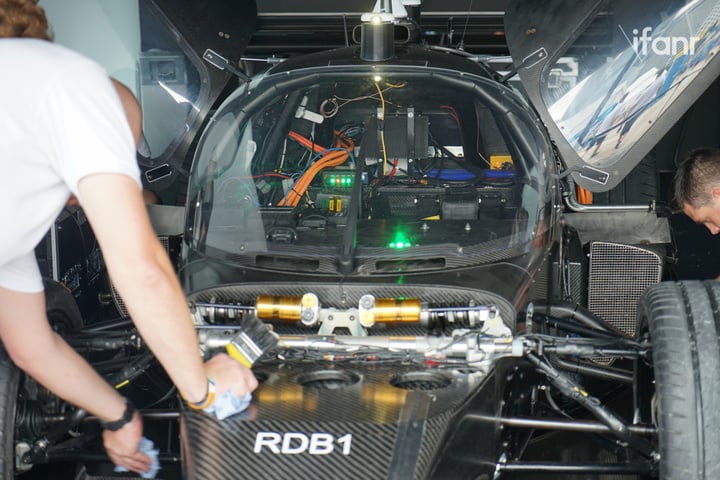
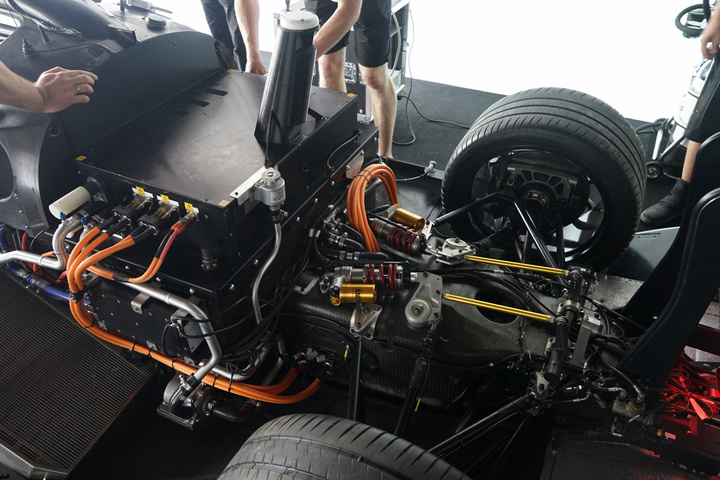
理想很美好,现实也真的很「骨感」,因为现在奔跑在 Formula E 赛道上的 Roborace 赛车还只是一台名为 DevBot 的工程车。作为 Roborace 的技术实验平台,Devbot 是不完美的。整车除了座舱有包裹之外,几乎所有结构都是裸露的,以便工程师快速进行技术调整。它的工作状况也不稳定,偶尔会让慕名前来看 Formula E 的观众扑个空。

(图片来自:Top Gear)
不过,在经历了 Roborace 团队与 Formula E 的多年融合后,Devbot 已经可以在无人搭乘的状态下自主跑圈,所以请来人类车手与 Devbot 一较高下不仅提高了 Roborace 的话题性,也是对 Roborace 无人驾驶赛车算法与传感器系统性能的综合考验。
一系列人机大战起源于 2017/18 赛季的揭幕战——香港大奖赛。Devbot 的第一位挑战者是资深 Formula E 现场女记者 Nicki Shields,记者而非专业车手的地位给 Devbot 留下了更多胜算。但出乎大家意料之外,人工智能里的专业「车手」Devbot 竟然以将近 8 秒的劣势输给了 Nicki。


这次失败并没有让 Roborace 的工程师们降低挑战难度,给 Devbot 反败而胜的机会。在 4 月份 Formula E 罗马站的第二次挑战中,他们竟请来了美国漂移车手 Ryan Tuerck。

专业车手的准备工作就是足量,启程罗马以前,Ryan 已经在 Roborace 的美国总部量身订做了贴合自己身形的新座椅,开赛前还深入勘测了罗马站狭窄的赛道。无论是 Roborace 的工程师还是 Ryan 本人似乎都以一种认真又兴奋的心情来准备这次挑战。
看这阵势如此专业,再考虑到 Devbot 在去年底香港站上的表现,第二轮电动赛车人机大战的结果早就没啥悬念了。在罗马街道长度为 2.84 公里的 Formula E 赛道上,Ryan 驾驶 Devbot 跑出了 1 分 51 秒 08 的成绩,Devbot 的 AI 系统最终只跑了 2 分 18 秒 04,差距巨大。
Devbot 人机大战头两轮均以自动驾驶失败告终,人类车手 Ryan 巨大的领先优势更是证明 Roborace 的自动驾驶技术还有很大成长空间。想看刺激的赛车?机器还得再练练。
谁更适合当 Devbot 的对手?
公平比赛的一个基础是竞争双方的实力相近,林志颖跟汉密尔顿跑圈那肯定不能算公平竞赛。同理,让 Devbot 和布埃米、罗森奎斯特这样的专业 Formula E 车手跑 Formula E 赛道,那也不算是公平(注:罗森奎斯特拿下了本赛季罗马站最快圈速记录 1:36.311)。

那么,让仍然有不少技术问题的 Devbot 自动驾驶系统跟人类车手较劲公平么?
赛车记者 Nicki Shields 的驾驶能力达到了可以上赛道的水平,但她毕竟不是赛车手,意味着开 Devbot 跑圈的时候也会有很多失误,这样的状态与仍在不断成长的 Roborace 自动驾驶技术有相似之处。
Ryan Tuerck 是专业赛车手,只不过他是漂移车手,他承认相比刷最快圈速,自己更擅长「贴着墙壁过弯」。因此在练习中 Ryan 也会错过最佳刹车点,出现一些小失误。

(Ryan 自己的赛车,一台移植了法拉利引擎的 GT86)
综上所述,Devbot 目前迎战的两名对手,其驾驶水平都介于普通人和习惯了电动赛车街道战的 Formula E 车手之间,又比 Devbot 算法更强,适合成为现阶段 Devbot 算法优化的标杆,为 Roborace 的工程师们提供一个清晰的研发方向。
如果标杆太强,那就无异于给 Devbot 设立一个十年大目标;标杆太弱无助于持续提高技术水平。现在这样则是刚刚好,期待能在接下来的 Roborace 人机大战中看见 Devbot 与人类的圈速差距有明显进步。






