






为了能让机器人干更多活,NVIDIA 打算教会它主动学习的新技能
如今机器人和人工智能技术的发展可谓日新月异,而人类研究机器人的目的之一,就是为了让机器人能够替代人类,去完成一些枯燥无味且高度重复性的工作。
在今年 3 月份,沃尔玛超市已经在美国尝试引入一种货架机器人,它能够自动扫描并检查货架中商品的在库信息,又或者是及时提醒服务员哪些商品出现了标价或位置出错的状态,据说效率会比手工检查高 50%。

(图片来源:Pittsburgh Post-Gazette)
然而就目前的技术来看,这种工业机器人想要投入市场使用,仍然需要先做一些特定的编程规则,而且关注的只是单一领域中单一类型的任务。一旦场景出现变化,机器人就需要再次从头开始学习整个任务,最终投入的成本可能还不如直接聘请一位新员工来得划算。
虽然机器人理解现实世界的方式与人类有所区别,但理想状态下,我们还是希望机器人能够和正常生物一样,用“手把手来教”这种更加直观的方式,让它能够自主学习并理解工作流程。这一点相比学习道德标准要简单得多,而且对于没有技术基础的商户来说也更有价值。
近期 NVIDIA 在机器人与自动化国际会议上展示的产品,就向我们展示了这种可能性。
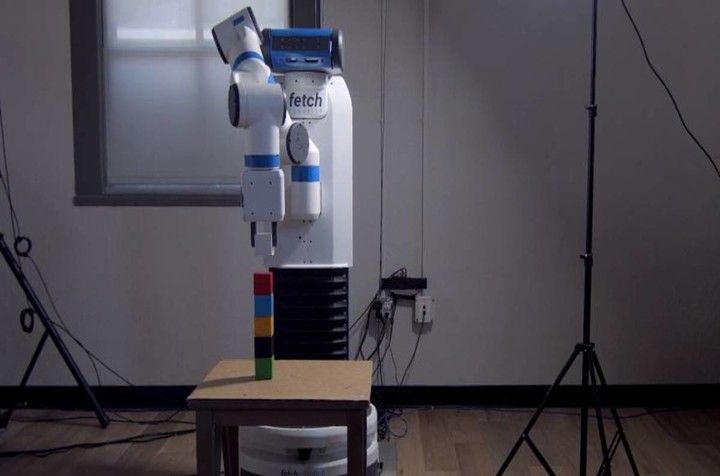
我们能从机器人摄像头的视角中看到,机器人模仿人类的流程,将各种不同颜色的方块按顺序堆叠在一起。虽然看上去并没有什么特别,但这个机器人此前并没有接受过“按黄绿蓝顺序摆放方块”这一特定任务的训练,也就是在没有经验的情况下完成了目标。
根据 NVIDIA 研究人员 Stan Birchfield 表示:“一方面,机器人确实非常适合执行重复性的工作;但另一方面,它们也很难应对突发情况,尤其是那些超出任务范围的工作。”
“如果没有专业技术人员在场,普通人如何让机器人去执行一个它从未涉足过的新任务?这显然不符合我们对机器人的期望。机器人想要帮助人类,就需要理解人类所做的事情,不仅是学习示范任务,更需要懂得预判下一步的操作。”

在合成数据、深度神经网络和域随机化算法的帮助下,NVIDIA 研究人员希望人类只需要在机器人面前示范一次,就让机器人完成感知、规划和执行这一“模仿和学习”的流程,让机器人能够理解只演示了一次的新任务。
就拿刚才这个实例来说,如果是一个发生在超市中的场景,货架上的商品散落一地,服务人员上前整理并重新摆放好,机器人通过观察就能理解并学会这一操作,之后的工作只需要交给机器人来做就好了。
除了 NVIDIA 的探索,去年 OpenAI 也推出过一个类似的机器人自主学习系统,同样是希望机器人能够直接在演示中学习新任务,并立即应用于现实中的场景,但后者是借助 VR 手段来训练机器人。
看来要不了多久,被机器人抢走饭碗这件事,又得成为台面上的热议话题了。
题图来源:IBTimes UK





