






3 级高速辅助 + 全场景安全,华为乾崑智驾 4.0 发布
这次的 ADS 4.0 版本比起之前的 2.0 和 3.0 版本更多的是优化了体验,里面的一些新的技术和功能最近也在具体车型的发布会上有亮相过。
华为自己把这次的版本升级总结为四个方面——架构升级、安全升级、体验升级和产业升级。

智驾功能优化
我们先直接讲智驾功能上的优化。
首先被提到的是车位到车位的功能优化。新升级的车位到车位功能优化了对高快速路 ETC 收费口的支持,在跨城通勤过收费站的时候,如果走 ETC 通道的话,现在不需要再接管了。同时到达目的地停车场后,泊车代驾功能可以自动接管,实现跨楼层的找位和泊车。

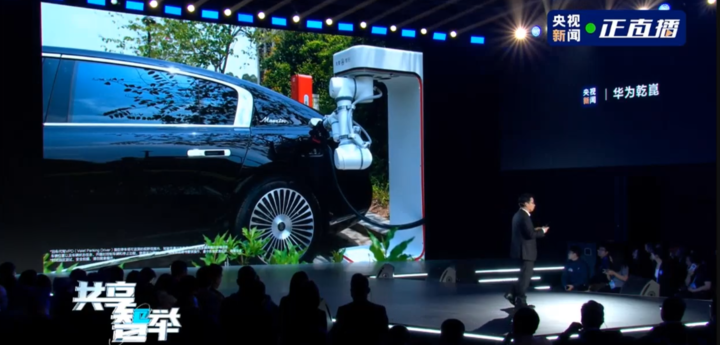
其次是实现了代客充电功能,在生态网络的充电站中可以实现充满电后自动离开,不用再担心被收占位费。不过这个功能真正的难点可能在于如何实现充电枪的自动拔插。
除了这两个功能优化之外,华为还预告了 4.0 版本智驾能力的各项方案。
第一档最基础的方案只支持高快速路的 NOA 以及城区道路的 LCC+ 功能。
第二档则在舱内增加了一个激光视觉的硬件,增强了高快速路 NOA 和城区 LCC 的安全性。
第三档增加了城区的 NOA 功能,也支持了车位到车位功能。
第四档的旗舰版才是真正具备高快速路 L3 功能的版本。

世界模型和数字底盘
然后是在架构方面的升级。
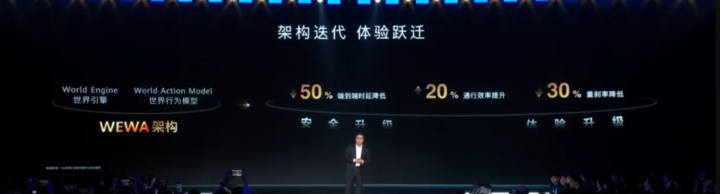
第一个架构升级是华为乾崑智驾 4.0 引入了世界模型,采用了新的技术架构和云端引擎,能够用 AI 技术来生成高质量和高密度的场景,从而更好的训练智驾模型。
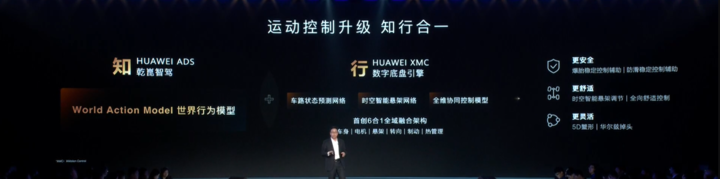
第二个架构升级则是在运动控制领域。华为新的 XMC 数字底盘引擎首创了六合一的全域融合架构,实现了车身、电机、悬架、转向、制动等系统的集成控制。
在集成的基础上,车辆可以对道路状态进行精准的预测,并且能够智能调节悬架,对车辆的 X 向、Y 向和 Z 向统一进行控制。
新硬件带来的安全突破
我们将以全时速、全方向、全场景、全天候、全目标作为我们主动安全的能力的目标,真正让安全是最大的豪华,变成越来越安全,越来越豪华。
最重要的当然是安全方面的升级。

这里要先讲三个新的硬件,一个是我们之前在问界 M9 和 尊界 S800 上见过的固态激光雷达,其他两个则是安装在舱内的激光视觉摄像头和分布式的毫米波雷达。
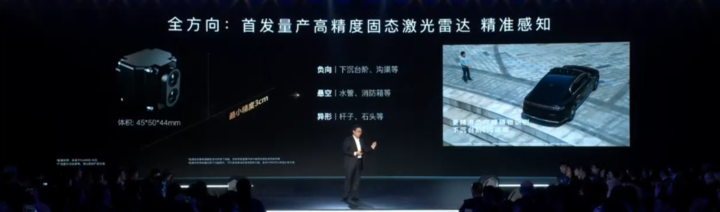
固态激光雷达最主要的作用是可以识别最小 3cm 左右尺寸的障碍物,降低了车辆撞上水管、消防栓等障碍物的概率,它还可以识别垂直方向的空间结构,比如各种台阶、沟渠等,能够保证在乡村道路和施工道路上的安全。
舱内安装的激光视觉摄像头则可以识别高速和暗光环境下的小目标,而且由于是安装在舱内,可以最大限度的减轻外部环境对它的干扰。华为在发布会上提到的最现实的应用场景是,车辆在以约 100km/h 的速度行驶时,前方出现了一个 30cm 高度的障碍物, 这个激光视觉摄像头在较远的距离就识别到了它,从而做到了安全刹停。

分布式的毫米波雷达则主要是提升了车辆在雾天以及对静止障碍物的检测能力。
在这些新硬件和全新数字底盘的加持下,AEB系统可以做到 4-150km 下都能生效,在前向刹车距离不够的情况下,也可以做到边避让边刹车,同时车辆在大雨场景和高速积水场景下有了更好的车身控制能力,在爆胎场景下也能做到车辆不失控,华为在讲到这里时展示了一段在 130km/h 的速度下发生了爆胎,但车身依然稳定的视频。

同样得到增强的还有驾驶员状态监测系统,在车内 DMS 系统的加持下,如果驾驶员处于失能状态,系统可以自动靠边停车,在支持智能车灯的车型上还可以自动打出 SOS 信号求救。
哨兵模式在 4.0 版本中也得到了增强,支持了云端回看录像。
至于产业升级,则主要就是指推动了行业从 L2 向 L3 进化。

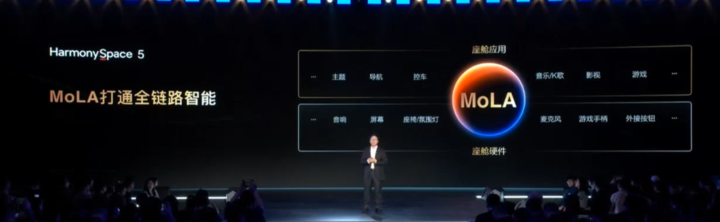
第 5 代鸿蒙座舱
华为这次也带来了新一代的鸿蒙座舱。
新一代的座舱采用了新的混合大模型架构,包含多模态的感知、通用大模型和小艺知识库,还包含了垂域的 agent,联通了鸿蒙生态的 API 和 车控的 API,在新架构的帮助下,全新一代的座舱可以更好的理解用户的语言并且精准执行,同时也能够联通车辆的硬件,实现座舱的全场景智能。
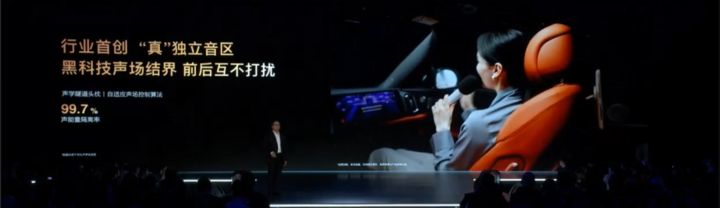
第 5 代的鸿蒙座舱也升级了不少娱乐性配置,首发了空间音频降噪和无麦 K 歌功能,能够实现「前排 K 歌,后排观影」的体验。华为也带来了新的 16.1 英寸车载智慧屏,支持 3K 分辨率,16:10 的黄金比例和 98% 的 P3 色域。在车内硬件联动上,我们在尊界 S800 上见过的光幕大灯也可以被用在其他车辆上。

同时得益于鸿蒙系统的互联能力,新一代的座舱也实现了车机、手机和家庭终端的互相控制。
华为乾崑智驾 4.0 版本似乎也说明了,未来智驾系统的进化方向将从功能新增转向体验优化和安全提升上来。





