





上海行:五年磨砺,RoboPeak 从团队到公司跨越
时间一转,这么多年就过去了。
在晚上八九点的时候,RoboPeak 的创始人陈士凯以及团队成员顾欢欢、刘义春在新车间接受了我的采访。在聊起团队的发展历程时,陈士凯突然想起明年就是团队创立五周年。
一时间,三个人陷入了沉默,表情很是感慨——从五年前决定踏足机器人开发领域,发起 RoboPeak 到现在,虽然人数好像没有太大的变化,但经历了动摇与坚持,停滞与发展,老成员的离开以及新成员的加入,RoboPeak 能够坚持下来实属不易。
目前, RoboPeak 不光开发出小型的机器人车 RPMini,还开发出可扫描二维平面地图的激光雷达 RPLidar。这两款产品的开发成功, 都验证了团队的成熟,以及产品上的成熟。现在的 RoboPeak 的成员有七名,其中有软件开发人才,也有硬件开发人才,团队的结构没有短板。而从知识结构上看,团队经过了近五年的机器人开发,从粗糙的机器人原型到有能力开发直接面向消费者的产品,积累了相关的技术以及团队协作的经验。
这是 RoboPeak 为 RPMini 制作的宣传视频,背景音乐是团队成员制作的
回头看四年时间的发展经历,陈士凯说当初经历了各种各样的困难。当时的硬件没有现在那么丰富,许多配件不是说价钱的问题,而是直接没有,比如说现在常见的无线 Wi-Fi 的模块,当时就没有地方可以买。
此外,一开始 RoboPeak 的成员都是软件开发者,缺乏硬件开发相关的经验——比如说将芯片直接焊接到电路板上,如果焊点比较细,那么失败率就比较高。总之,因为各方面条件的缺乏,开始创立的两年时间,RoboPeak 没有多少像样的产品出来,团队成员得不到正向激励,凝聚力一度下滑,有的成员选择了离开。
但到了 2011 年,RoboPeak 迎来了大的发展,某种程度上,这是因为刘义春的加入,他此前在华为做硬件开发,做设计电路那一块,补齐了团队的短板。陈士凯也说,“‘大牛’(刘义春的绰号)的加入,一下子提升了我们的技术水平。”——也许没有硬件开发人才的加入,RPMini 的电路设计部分,要拖更长的时间才能完成。
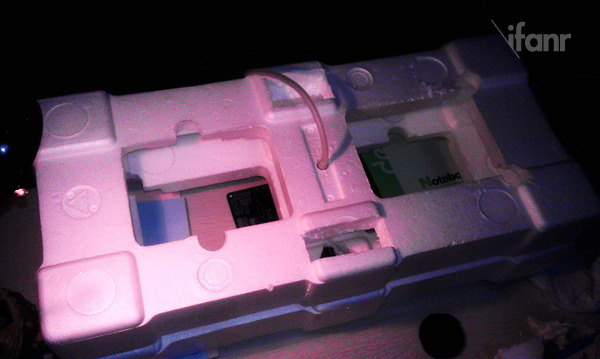
为了焊接密集针脚的芯片,刘义春自己利用泡沫塑料以及现有的材料设计了“山寨版”贴片机,上面有一个真空泵
也许大家不知道, 2010 年 RPMini 的第一代原型机已经被团队开发出来,但当时这部机器完全无法与 RPMini 相比。首先是体型,RPMini 仅为 8 厘米,而第一代原形机的身高足有 70 厘米,从图片也可看出第一代原形机给人的感觉十分粗糙,头部硕大的摄像头,多层电路板以及连接用的电线等等。一看就知道是“玩票”的作品,没办法实用。
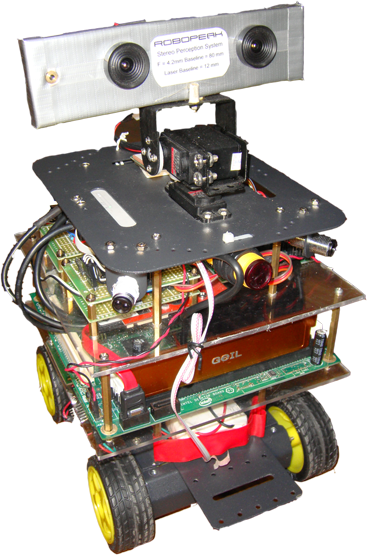
这就是第一代原型机,身高 70 厘米,基于 x86 平台开发,身上装了一个性能极差的激光雷达
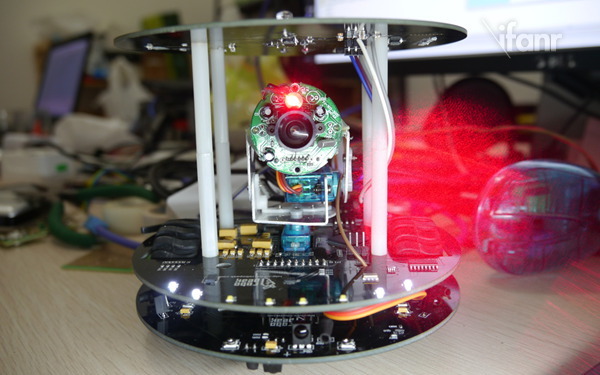
RoboPeak 还改装了一部玩具机器人小车,开发出 RPMini 的第二代原型机。但团队开发的过程中,遭遇到许多的难点,陈士凯说,“别人的玩具是一个成熟的体系,我们在(小车)上面装一个电路板是小事,但问题是我们还要安装各种各样的传感器,这个时候就很头痛了,要拿胶水黏之类的,装起来很难装,装出来后又很难看。”

刘义春说,“安装是其中一个原因,另外的原因,它是一个已经成品的机器人,它所选用的设备完全是针对那个玩具的标准的,但我们的要求要高一点。”不管如何,第一代原型和第二代原型的开发, RoboPeak 提供了许多思路,比如说机器人的软件构造是怎么样的,机器人的每个部件是怎样驱动的,整体应该如何设计等等。
之所以 RoboPeak 对 RPMini 第二代原型不满,是因为他们自己本身是软件工程师,希望软件的性能执行起来更高一些。而“别人的东西始终是别人的”,玩具小车没办法达到团队的目标,以及他们个人的追求。
在采访 RoboPeak 期间,有老外走过来,约陈士凯第二天做一个介绍 Oculus Rift 的小演讲,然后他看到了 RPMini,拿起来赞叹不已,但听说它的开发不基于 Arduino 后,就说 RoboPeak 是“作弊”。为何陈士凯他们开发机器人,不基于开源硬件的平台?陈士凯说:
做开源硬件或创客的人都喜欢用 Arduino 平台。但我们是做软件开发的,比较追求性能,后来我们觉得 Arduino 的性能不够用,然后采用 ARM 的平台。……如果我们把硬件焊好,最终产品仅仅是一个开发板,那么如果是卖给有经验的人,可能会在上面开发。但如果将产品卖给刚刚大学毕业的,他们买回来,还需要自己了解每个部件的代码,研究如何使用。比如说让机器人从这边跑到那一边,然后再跑回来,那么还需要编写许多和程序部分无关的代码,电子啊驱动啊之类的,等学习完之后,相当于重复一遍 RoboPeak 的发展历程。所以我打算把常用的工作实现过后,就制作成标准的模块,这样别人开发的时候只要调用相应的函数就实现相对应的功能。
由于 RoboPeak 开发机器人从一开始就是模块化的思路,因此之前开发项目所积累的技术等等都能复用到后来的项目中去,为自己带来了方便。此外,陈士凯还希望 RPMini 成为通用的机器人平台,不但提供简易的开发环境,还开放给各行各业,让更多的人开发基于 RPMini 的应用程序。
在 2011、2012 年期间,由于 RoboPeak 发展较快,开源的 3D 扫描仪、激光键盘、激光雷达等项目并行开展,进度也快;团队屡屡带着自己的作品,参加北京、上海、深圳的创客展览,相互之间的沟通开始增加,团队的凝聚力不但恢复,还有进一步的提高。
实际上,为何 2010、2011 年的时候,会有成员选择离开呢,其实背后有许多原因。一个是大多数成员已经毕业两三年,面临成家立业、跳槽的问题。那段时间许多人都没有人顾得上 RoboPeak,就连陈士凯自己也没有时间。当时团队成员最多就是出来聚一聚,联络一下感情,但没有花多大的精力在开发机器人上。
有的时候,一个决定的背后,有许多原因。

至于 RPLidar 这部激光雷达,按照陈士凯的说法,与整个团队的希望开发“自己会动”的机器人有关系。但如果要让机器人会动,就得让它清楚自己所处的位置。如果在室外,由于现在导航的发达,问题很好解决。但如果在室内,那么麻烦就来了:一直到现在,室内导航仍未成熟,虽然 Google 等在投入力量研发,但尚未有成熟的产品出来。RoboPeak 在寻找解决方案的时候,发现激光雷达是一个很成熟的解决方案。一是激光雷达扫描一圈之后,基本上室内的平面图就已经画好,二是该领域已经经过几十年的研究,相关的论文很容易查,网络上有开源的程序下载。
所以 RoboPeak 在设计 RPMini 第一代原型机同一时期,也自己开发了一个激光雷达。不过那只是试水的作品,不但笨重,性能也差,扫描一周大概要 30 秒,也就是说机器人 30 秒之后才可能动一厘米,无法实用。但随着现在硬件的进步,许多硬件上的功能可以通过软件来实现并增强,所以 RoboPeak 现在有机会开发出性能不错的激光雷达——市面上即便最便宜的那款激光雷达,价格是 RPLidar 的一倍以上。
陈士凯说,如果 RPLidar 以后量产,价格甚至是市面上最便宜那款的十分之一以下。
经历四年的发展,RoboPeak 的确走出了自己的道路。外表斯文,说话温柔的顾欢欢说,“团队的不同阶段会变得比较微妙,从心态上,旁人看你的,我们正在慢慢经历这样的转变,包括团队创立到现在,也可以算是一种心路历程吧。从 09 年(成立)到现在,形成这样一种相互的合作模式上……(我们)能持续下来其实相当不容易的,因为各自都有自己的事情,成家或者是工作,纯粹凭借着业余的兴趣爱好,顶着大部分人的目光,坚持下来。”
RoboPeak 之所以能存在这么长的时间,也许跟团队的成员资格相关。陈士凯一开始对成员的要求就是上海本地,他说:
可能一开始我们本来就是同学或者是同事,后来也有网上认识的,但不管怎么样,我们都要求成员在上海本地。我们不是很相信异地协作,因为(我们)本身不是什么公司,不是一种很严密的组织,那么如果长时间不见面,那么团队就会散。
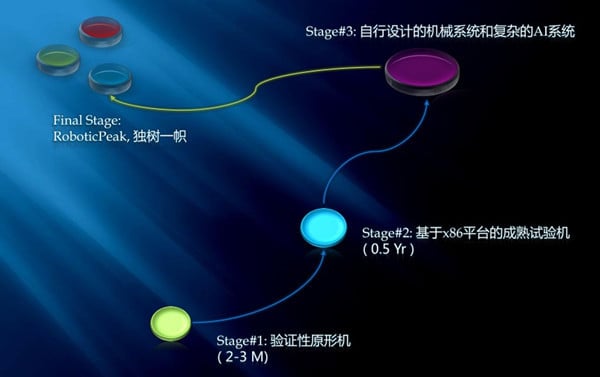
在陈士凯心中的 RoadMap 里,RoboPeak 未来将成为一家位于上海的机器人公司。实际上,在 2009 年创立 RobotPeak 的时候,陈士凯制作了一张 PPT,他为自己的团队设定四个发展阶段:
- 第一阶段:利用目前已有的技术迅速搭建原形机;
- 第二阶段:使用 x86 平台作为机器人的控制中心,提供所有成员使用的开发平台;
- 第三阶段:正式进入机器人研究、自由开发阶段。具有成熟的机械、硬件、软件开发团队和平台;
- 第四阶段:RoboPeak,独树一帜。
由于陈士凯当时也不清楚 RoboPeak 最终的形态,因此只列出了几个可能的方向:参加比赛、艺术展览、商业化、发表 Paper。如今,经过四年时间的摸索,他已经放弃了其它方向,决心将 RoboPeak 变为一家公司,走向商业化的道路。他认为,这是最有利于团队今后发展的方式。
如今,陈士凯已经全职,但面对的第一个问题就是劝说现在的团队成员离开本职工作,投入到创业中去。显然,不是所有人都愿意离开安全区。经过考虑,陈士凯决定这样操作,一开始会拉一两个人出来全职,其他人保持兼职,但他会设定期限,如果超过这段时间,兼职的成员仍不愿意全职,那么他只能离开团队。陈士凯说,“有时候,是很残酷的一件事。但没办法。”
虽然陈士凯未来将面临公司化运营、产品商业化的挑战,但他说,“既然作出决定,那么就只能走下去。”可见外表温柔的他,实际上,有着一颗勇猛的心。






