





人形机器人平衡能力达新高度,Google 旗下公司再次展示黑科技
一个机器人突然就火了。
近日,波士顿动力(Boston Dynamics)在国外视频网站 YouTube 上公布了新一代人形机器人 ATLAS 的演示视频,不到一天就获得超过 10 万次点击,现在点击数已经将近 8 百万。国内各大视频网站、科技网站、微信公众号也转得到处都是。
ATLAS 能干什么?
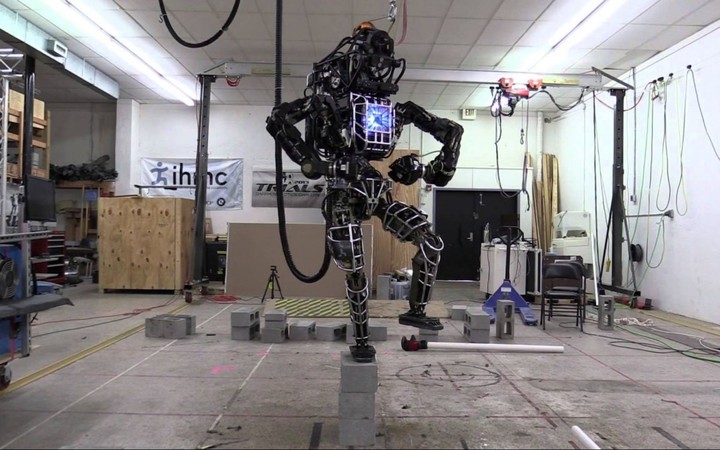
ATLAS 高 5.9 英尺(1.79 m ),重 180 磅(82 kg ),依靠电力驱动和液压制动,背后背了个电池包。身体和腿使用了传感器来保持平衡,头部使用了激光雷达和立体传感器以避开障碍物、评估地形和帮助导航。
ATLAS 在雪地上行走,打滑了能自动恢复平衡:
被别人故意推倒,自己会爬起来:
像朋友一样陪你散步:
也能做粗重活,搬搬箱子什么的:
下面这个视频能让你更全面地感受 ATLAS 的厉害:
演示视频中没有解答的一个问题是:ATLAS 是由人控制的,还是完全自主行动?
波士顿动力的创始人兼主席马克 · 雷波特(Marc Raibert)告诉电气和电子工程师协会(以下简称 IEEE)Spectrum,视频中室外的场景中,人类通过无线进行大体的遥控,ATLAS 自己使用立体和激光传感器调整以应对地域的变化。另外,ATLAS 的平衡和运动控制都是自行完成的。
视频中室内搬箱子的场景,最先是人工设置了程序,告诉 ATLAS 要去搬箱子,它接着会自动去追随箱子,不管被故意推远多少次。
这么多机器人,为什么就 ATLAS 火了?
双足人形机器人的运动稳定性一直是难题,爱范儿 2015 年 6 月曾经报道过美国国防部高级研究计划局(以下简称 DAPRA)机器人比赛,里面的人形机器人都是踉踉跄跄地行走,很容易摔倒,还不能自己爬起来。如果想象不出来这些机器人和 ATLAS 的差距,来看看这个有点滑稽的机器人摔倒集锦:
事实上,ATLAS 在 2014 年第一届 DARPA 机器人比赛上也出过洋相:

不过这是 ATLAS 第一代产品,波士顿动力前几天公布的视频已经是第三代,维持平衡、规避障碍物、探测地面状况以及完成巡航任务等能力大大增强,和 DARPA 上的窘态大相径庭。而能做到这种平衡程度的,目前已知也只有 ATLAS 这么一个了。
加州大学伯克利分校的机器人学教授 Ken Goldberg 说道:
这十分令人惊讶,它的运动真的流畅了许多。当机器人遇到具有冲击力的突发事件时,比如人类用曲棍球棒戳 ATLAS 的前胸,对系统来说相应是非常困难的。ATLAS 的反应尤其令人印象深刻,因为研究人员推的是它的胸部,即重心的位置。

ATLAS 是怎么做到如此稳定的?
马克 · 雷波特向 IEEE Spectrum 透露,ATLAS 的平衡能力得感谢负责控制的团队,他们开发了新的算法,同时使用了改进后的机器人强度重量比,其他的性能也有进步。
新的算法能让 ATLAS 通过快速移动、选择新的落脚点来实现动态平衡。至于具体算法是怎么样,IEEE Spectrum的报道也没能透露更多细节。
此外,波士顿动力的创始人兼主席马克 · 雷波特(Marc Raibert)还告诉 IEEE Spectrum:“工程团队做了大量工作,让 ATLAS 变得更轻更紧凑。我们使用 3D 打印制作机器人的腿部,这样制动器和液压管可以嵌入腿部结构里面,而不是作为独立单元放在外面。我们还开发了定制版的伺服器,比之前使用的版本更小更轻。”

波士顿动力公司什么来头?
波士顿动力是前 MIT 教授马克 · 雷波特在 1992 年创建的公司,2013 年被 Alphabet(Google) 收购。
(波士顿动力创始人马克 · 雷波特)
雷波特被誉为 “美国的行走机器人之父”,他对行走机器人的研究最早是从一个名为 “The Hopper” 的小项目开始,通过这个项目测试了一些早期的概念产品。
更早的时候,雷波特曾在卡耐基梅隆大学创建了一个名为 Leg Lab 的实验室,用于研究行走机器人。随后,雷波特又转战 MIT,为政府部门建设工程系统。再后来,雷波特创建波士顿动力公司,集中研发行走机器人。
波士顿动力并不销售商用机器人,他们主要为位于五角大楼的国防高级研究计划局研发产品。此外,他们还曾为索尼的商用机器狗 Aibo 提供过咨询服务。
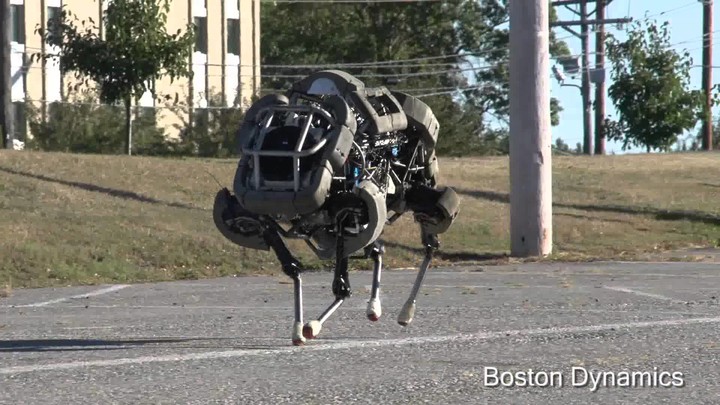
除了人形机器人 ATLAS,现在能够体现机器人前沿研发水平的产品还有大狗、Spot 和 Cheetah 等。
DARPA 资金支持的大狗是一个四脚机器人,能够穿越泥地和雪地,以 5 英里/时的速度慢跑。
为美国海军陆战队开发的机器狗 Spot,被踢之后还能恢复姿势:

目前全世界最快的机器人 Cheetah,时速能超过 29 英里:
波士顿动力的科学家同样以虐机器人著名(大雾),踢机器狗 Spot 时就引起了很多人的不适,不知道你有没有感到一丝心疼?





