






老车主哭瞎,特斯拉要对新版自动驾驶系统进行硬件更新
第一起自动驾驶死亡车祸是怎么发生的?特斯拉事故复现分析。
没完没了!特斯拉今天咋又双叒出事故了?
特斯拉自动驾驶国内爆出首例事故。
从今年 7 月第一起因为特斯拉自动驾驶引发的死亡事故以来,这几个月,有关于特斯拉自动驾驶的争论就没有停过。在最初对自动驾驶的新鲜感耗尽后,人们对特斯拉的自动驾驶技术开始了一波回潮式的集体舆论质疑。

不过,质疑和唱衰声不断,但特斯拉并不准备放弃自动驾驶功能,而是继续在测试新版的自动驾驶,改善其功能。
有消息称,特斯拉的自动驾驶功能将会迎来重大更新,和以往的软件升级方式不同,此次特斯拉将会推出新版本的自动驾驶硬件,用更多的摄像头和传感器来避免事故。
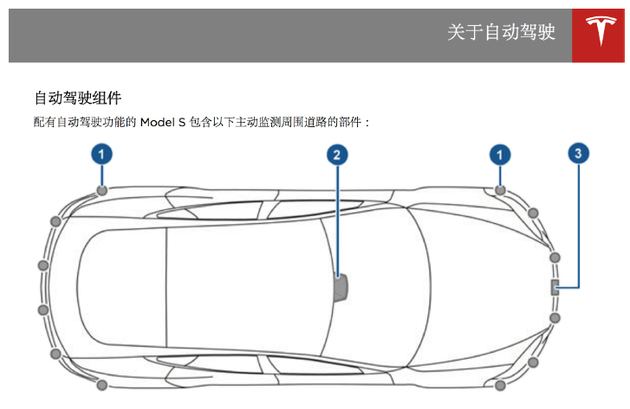
(目前 Model S 的传感器)
目前的特斯拉自动驾驶组件主要由 3 个部分组成:位于前后保险杠附近的超声波传感器、位于挡风玻璃后视镜下方的前视摄像头和安装在前格栅中部的雷达。从目前得到的消息看,新版的自动驾驶固件将会将摄像头数量提升到 3 个,并且新车也会在车身 4 角安装雷达,以实现类似激光雷达的监测效果。
加入更多传感器后,新版车辆对于周围环境的监控能力会比现在的车型更好,将 4 个雷达安装在车辆 4 角的设计方式,也会比目前车辆周围使用超声波传感器的监测范围更大。
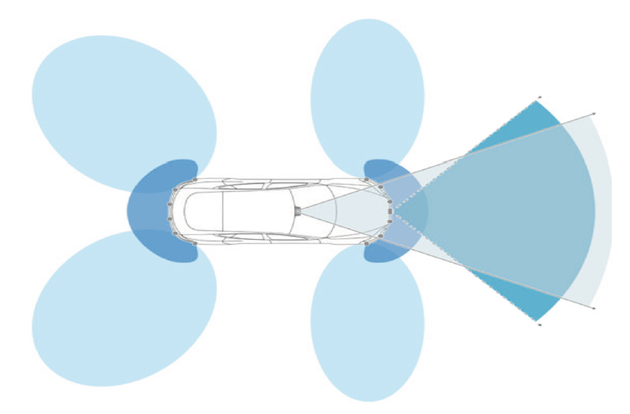
(目前 Model S 的传感器探测范围)
虽然这套全新的自动驾驶硬件的发布时间还不能确定,但此前马斯克就已经透露,对于自动驾驶技术的重大更新即将到来,并且新版自动驾驶的推出时间会比人们预期更快。
为了更好的自动驾驶性能来更新车辆硬件,不知道看了这个消息后,已经购买了特斯拉 Model S 和 Model X 的车主会怎么想。毕竟直接通过软件更新而不是硬件升级,就能为车辆带来更多功能,是特斯拉的一大特色。

给汽车系统持续升级,修复漏洞完善功能的做法,让特斯拉对比传统汽车厂商卖出车辆后就不管持续维护的做法显得更加人性化。不过现在看来,为了让自动驾驶的功能性和安全性更加完善,仅仅通过软件优化,恐怕已经达不到特斯拉对自动驾驶功能的更新需求,所以只能推出更先进的硬件。
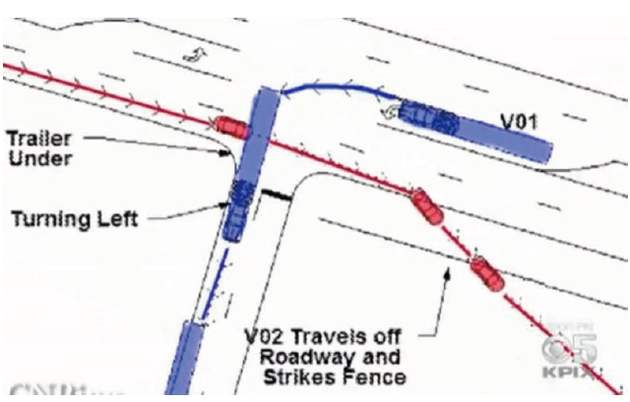
(特斯拉第一起自动驾驶致命事故示意图)
其实复盘一下特斯拉自动驾驶的第一起致命事故,就能明白特斯拉为什么要更新自动驾驶硬件而非优化算法进行软件更新。从上图就可以看出,自动驾驶中的特斯拉撞上了转向中的白色半挂车。当强光导致了自动驾驶的摄像头致盲之后,前方的雷达也没有识别出对向行驶车辆后,坐在车里安心看哈利波特的车主就撞上了大货车。虽然特斯拉拥有强大数据积累的自动驾驶算法,但在应对某些极端特定情况时,传感器的监控范围还是不够大。

当特斯拉在车四角增加了 4 个毫米波雷达后,就能实现类似于激光雷达的作用,对周围障碍物实现全面的扫描,而 3 个摄像头的设计,也可能减少在特定强光下致盲失效的几率。
对于特斯拉为下个版本的新车更新自动驾驶技术硬件,爱范儿也采访到了特斯拉的资深爱好者和车主 Ryan·W,他表示:
真是传说中的 Autopilot 2.0,那么改进应该只针对下个版本的新车,不会简单移植到现有车上。我看到的分析是说目前 1.0 系统效率不是最优的,因为这套系统本身是在原始系统上面加入了 Mobileeye 的 ADAS 系统,Tesla 的系统必须提供道路和 GPS 数据给 Mobileeye,再返回来控制车的动力系统 。
Mobileeye Q3 由于其封闭性能和 Teala 交互的接口本能就是附加上去的,所以精度和效率并不完全达到Tesla的要求。所以 Tesla 如果搞 2.0 为了达到level 3 等级的自动驾驶乃至 level 4 必然要专门把硬件底层的 API 做好,让道路数据和高精度地图以及车辆状态控制无缝结合。所以这会是一个非常庞大的工作量,不简单是表面上加两个摄像头,几个传感器,内部的设计会大变。
不过,即使加入新硬件,特斯拉仍需要大量的真实道路测试来优化算法,新硬件将会先搭配目前版本的自动驾驶软件来使用,以积累更多数据。
特斯拉的老车主也完全不用担忧自己被抛弃,因为特斯拉还是会持续维护自动驾驶的软件进行更新优化。有消息显示,特斯拉已经在测试针对 Model S 的自动驾驶 8.0 版,对自动驾驶在交通拥堵车流当中的性能进行改进。

在文章的最后,爱范儿还想说的是,虽然特斯拉的驾驶辅助系统叫做 Autopilot 自动驾驶,但目前这个功能其实还处在 Beta 测试的阶段。自动驾驶还会犯很多我们人看起来不该犯的错,车还没学习到足够完美的程度。
Elon Musk 曾经说过,当自动驾驶功能的特斯拉累计行驶里程达到 100 亿公里时,自动驾驶才能摘下 Beta 的帽子,在技术完全可靠之前,还是要注意安全。





