






爱范儿试乘百度无人车,这个驾驶新手需要多久才能变成“老司机”?
自动驾驶这一概念的火热,大概是从今年特斯拉出了第一起 Autopilot 致死事故开始的。
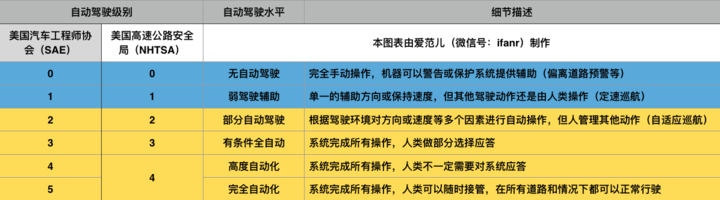
尽管被叫做 Autopoilt,但实际上,特斯拉提供的方案仅仅是一个达到 SAE 2-3 级的驾驶辅助方案,也就是说还需要人的决策来进行控制。真正的自动驾驶,是车辆完全自主控制驾驶,整个过程无需人来进行决策。
在今年,百度展示过几次自己在无人车领域的研发进展和路试结果, 9 月份的百度世界大会上,百度副总裁、自动驾驶事业部总经理王劲透露,百度自动驾驶汽车将在第三届世界互联网大会期间亮相。昨天,爱范儿在乌镇,实地体验了一把百度的无人驾驶。
超车、调头、紧急刹车,我们坐在车内体验了一把无人驾驶

和前几次展示的无人驾驶方案一样,此次的无人车还是由一个放置在车辆顶部的 64 线激光雷达、3 个环绕车顶的 16 线激光雷达、位于车顶前方的两个视觉识别摄像头、以及车前方的毫米波雷达组成,辅以 GPS 高精度地图在车载计算中心的控制下,实现无需人类操作决策的机器自动驾驶。
与前几次展示的样车不同,此次百度展示的无人车共采用了 3 个车型,并且在外观上看起来完成度更高,全车换了全新的蓝色涂装,顶部的传感器部分也进行了外壳的包装而不像之前的测试,仅仅将传感器搭载在支架上。

由于这几款全自动驾驶车还是由普通汽车改造而成,车内还是传统汽车的样子,驾驶座也有驾驶员来保证安全,方便随时接管驾驶。
目前比较知名的驾驶辅助系统特斯拉 Autopilot 可以实现自动跟车、自动车道保持巡航、自动刹停,当驾驶员主动打出转向灯,特斯拉可以实现自动换道并线,但无法大角度转向调头。

作为达到 L4 级别的全自动驾驶无人车,百度无人车可以完全不通过人操作,仅仅设置出发点和终点后,就可以自动在精度达到厘米级的高精度地图内自动驾驶。整个试乘过程不长,3 分钟左右的时间行驶了 3.16 公里的距离,整个过程很像驾照考试时候的科目三路试。
在这 3 公里的试乘中,我们乘坐的百度无人车刚好遇到了这样几种考验无人车自动操作的特定情况:前方有车车速较慢、需要超车、自动回到车道、红灯停车、并线到转向车道进行调头、到终点停车。

在车内人员系好安全带后,通过车载中控处摆放的 iPad,驾驶员就可以开启自动驾驶,将之后的驾驶过程全部交给汽车进行。iPad 上会显示高精度地图的车道、车辆位置,传感器探测出的周边车辆、非机动车或者行人等可能会干扰到正常驾驶的物体都会在地图上以黄色方框的形式标注出来。在这段路况良好的路段上,百度无人车可以以接近 60 km/h 的最高限速自动行驶,并且能看到方向盘的明显自动抖动来时刻纠正驾驶路线。
当前方道路出现车速较慢的车辆时,百度无人车会先进行刹车,可能是百度对于安全刹车的调校比较敏感,整个刹车过程显得比较突然。开惯有驾驶辅助功能车辆的我,本以为百度无人车接下来会跟着前车缓慢行进,然而在监测到前车车速较慢且旁边车道利于超车后,百度无人车果断地向左打了方向盘并进行了一次超车,在确定安全之后,回到了原来的车道。

在遇到红灯时,车顶前部的双摄像头的视觉识别会识别出信号灯颜色,车辆会自动在停车线刹停,绿灯出现后,车辆自动启动继续正常行驶。到达测试路段的调头点前,百度无人车自动并线到了转向线并自动调头,选择中间车道行驶。整个调头过程方向盘并不是一把到位,而是在进行转向后采取小角度时刻修正的方式,这样在遇到突发情况时会更容易调整方向。
在返程过程中,我乘坐的百度无人车又遇到一次前方因为前方车辆较慢而减速的情况,依然是一个急刹车避免碰撞,之后前方车辆车速加快,无人车就没有变道超车,在行驶一小段路后自动停到了终点。
总体来说,这次的实际路试结果还是让人满意的,整个试乘路段属于社会路段,尽管车道较宽且路况良好,但路人和车流其实算不上少,无人车都够很好地做出自动进行监控并做出下一步驾驶决策。不过正常行驶时不停快速抖动的方向盘还有遇到前车时的紧急刹车减速还是让初次乘坐无人驾驶汽车的我捏了把汗,好在这些都是可以通过之后的测试学习和算法优化进行调整的。
总价超百万的激光雷达,百度想在 5 年内将成本降低百倍

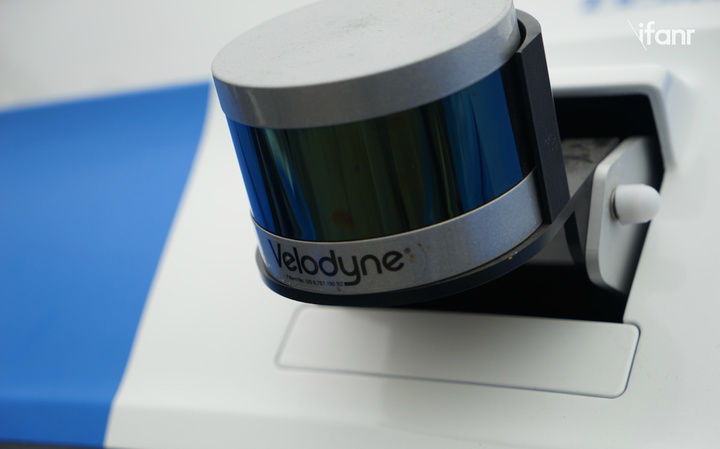
作为自动驾驶套件的核心传感器,激光雷达的成本和售价十分受人关注,因为目前通过激光雷达获取周围环境数据的方式,可以说是无人驾驶汽车上的最佳解决方案。

百度无人车使用了一个 64 线 Velogyne 激光雷达来放置在车顶监控周围环境,还在车顶周围布置了 3 个 16 线的激光雷达监控车身周围的死角,确定车辆周围的安全,这样的设计可以说是十分保守且成本颇高的,整套激光雷达的成本几乎能达到百万人民币的级别,显然是无法民用。
爱范儿对此采访了百度的相关负责人,在被问及百度会不会在之后调整传感器方案,来降低整套无人驾驶套件成本,以方便之后的民用和商用时,百度方面表示:
百度无人车目前的考虑点并不会在整车成本上,而是要保证整套自动驾驶系统的安全运行。激光传感器的售价现在虽然高,但是仅仅是一个阶段性价格,并非生产成本,在五年后激光传感器的成本将会降低 100 倍左右,64 线激光雷达的单个成本会到 500 美元左右。
事实上,百度早已经在激光传感器的成本降低上进行了布局,在今年 8 月份,百度和福特联合投资了激光雷达的生产公司 Velogyne,用以提升 Velogyne 的产品设计和扩大产能,进一步降低激光传感器的制造成本。
当激光传感器成本降低了,百度这套几乎可以适配任何车型的自动驾驶套件就显得更为实用靠谱了,毕竟尽管特斯拉目前已经表示将会为自家之后的车型配备完全自动驾驶套件,但这套套件主要还是通过 8 个摄像头、12 个超声波传感器和 1 个前向雷达组成的,这样的设计虽然在现在来讲成本比使用激光雷达要低上不少,但摄像头和传感器更容易受到极端环境的干扰。

可以说,百度近乎保守的在自家的自动驾驶车上使用上 3 个目前售价高昂的激光雷达传感器,就如同跨过驾驶辅助系统直接研发 L4 级全自动驾驶汽车是一样的野心,直指未来。而百度也为自己无人驾驶汽车设定了一个不远的未来目标:3 年商用、5 年民用。
降低了激光传感器成本的同时,百度要做的,还有校正优化整套自动驾驶算法还有构建高精度地图。构建高精度地图是百度相比于其他研发自动驾驶汽车的传统车厂的优势,而对于自动驾驶算法的优化和调校,就是一个长久的机器学习的过程了,百度无人车累计的里程越多,遇到的情况越多,越能将自动驾驶可能遇到的所有情况都记录到,这就是个无人驾驶老司机的经验培养的过程了。
完成度颇高的百度无人车,要想真正上路究竟还有多大难度

尽管百度目前已经提出三年商用五年民用的未来目标,我们就来看看这个终极问题:百度无人车究竟离进入普通人生活还有多远?
这个问题其实要分为 3 个层次来看:
无人驾驶汽车生产究竟有多难?
无人驾驶汽车对路或者说是地图有什么要求?
无人驾驶汽车和传统汽车同时存在于路面时遇到的各种迷之矛盾。
先来看看前两个问题,这两个问题比较好解决,在乌镇,百度展示了 3 种车型的百度无人车,所搭配的传感器配置在本质上是没有区别的,所以百度完全可以成为无人驾驶方案提供方,为各家厂商的传统汽车进行适配,之后根据车辆性能进行简单的校对就可以正式上路,可以说,让传统汽车变成无人驾驶车并不困难,而无人驾驶车行驶所需要的高精度地图,也可以通过逐渐的绘制和数据积累覆盖越来越多的地区,避开某些敏感地区并且标注好就好。
无人驾驶汽车真正进入普通人生活,其实除了硬件和技术方面的难度,还面临着不少至关重要且难以避免的矛盾。

实际上无人驾驶汽车无论如何也不只是一个汽车厂的技术生意,车辆既然无人了就需要考虑汽车与环境、汽车与人以及汽车与汽车之间如何互动的关系。大方向看,无人驾驶汽车的目的不应该仅仅是为了酷炫,而应该考虑的是未来汽车利用率、土地资源的合理利用以及社会智能设施建设的多重问题。
这样看无人驾驶汽车应该是一个未来社会交通问题——无人驾驶汽车究竟会如何改变我们的出行,重塑怎样的交通方式?
至于这个问题的最终答案,就要随着无人驾驶汽车的逐渐普及慢慢解开了。





