






有了微软的这个无人机技术平台,你可以免费炸机无数次
对于一个拥有正常视力的行人而言,他可以非常容易地分辨出哪些东西需要躲避(比如说树、路牙和玻璃门),哪些东西不需要(阴影、反光和云朵);他也可以对道路状况进行预判,比如说在街道拐角处就会提前注意是否有车开过来。

但这些工作对于一些试图通过人工智能来实现自动化的系统来说,是非常困难的事情;这也是自动驾驶或无人机技术发展的重大阻碍。
微软决定改善这一现状。
微软推出一个全新的开源平台
近日,微软在官网宣布推出一个名为 Aerial Informatics and Robotics Platform(中文可翻译为:空中信息学和机器人平台)的开源平台,其主要作用是:研究者和开发者可以利用它,来自主、安全地训练和测试机器人、无人机和其他设备。
目前,该平台的 Beta 版本已经在 GitHub 上线,可以免费下载使用。
截图自 GitHub
这个平台的开发项目的专门负责人,是微软研究所的高级研究员 Ashish Kapoor,他所在的小组主要专注于自适应系统和交互的研究;不过最近他主要负责的就是这个平台。
根据 Ashish Kapoor 介绍,这个平台与其他人工智能项目的不同之处在于,它所提供的测试和训练环境是基于人类的真实生活场景的;而其他项目对于人工智能的训练主要是在已经被人工定义好、并且拥有具体规则的环境中,比如说棋盘类游戏。
因此,Kapoor 表示:
这是 AI 的下一次飞跃,它将会是更注重于真实世界的(人工智能)系统。
模拟出真实世界
对于一台在空中飞行的机器人(也就是无人机)来说,想要分辨出墙和阴影之间的不同,不是一件简单的事情;在测试过程中,很有可能会让无人机撞无数次墙。
当然,最近比较流行的模拟器也许可以提供一些帮助,但它们并不能很好地反映出真实世界的复杂状况。因此,最理想的状况是,让模拟器无限接近真实世界的场景。
微软给出的模拟器
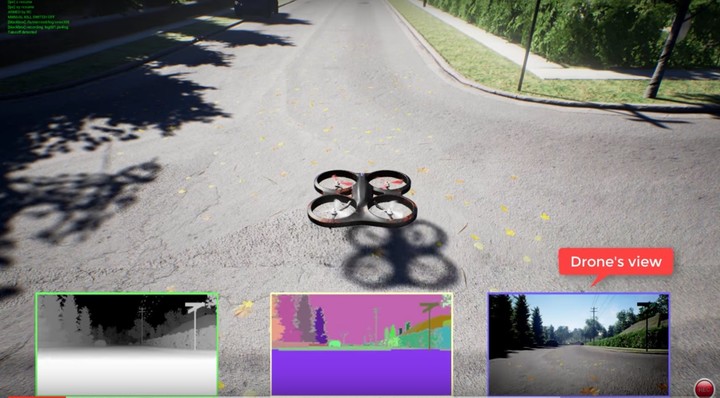
这就是微软的优势所在。借助微软在图像硬件、计算能力和算法方面的巨大优势,微软研究所恰好开发出了一个能够展现真实生活场景的模拟器。该模拟器能够非常清楚地展示一些微小的细节,比如说阴影、反光,与通过计算机视觉算法模拟出来的场景大为不同。
这个新的模拟器就被应用于上述开源平台中。它显得非常真实,但又并非真实,这就给开发者提供了非常安全、可靠和便宜的无人机虚拟测试环境。
因此,使用微软的这一平台,有两个好处:
- 开发者可以任意“炸机”,不限次数,不需要花费数万美元的钱,也不用担心会伤及无辜。
- 开发者可以通过此平台做更好的人工智能研究。由于这类研究需要大量的试错,开发者可以从测试过程中收集大量的数据,用以构建让无人机系统安全运行的算法。

测试数据的收集
智能机器人系统的构建
在 Aerial informatics and Robotic Platform 中,除了有上述模拟器之外,还有一系列的软件,能够让开发者在两个最流行的无人机通信协议 DJI 和 MavLink 上编写可以控制无人机的代码。

基于 MavLink 的无人机
由于在一般情况下,开发者需要花费大量时间研究不同的 API,而且不同的平台代码也不同。因此,微软所提供的软件大大方便了开发者。
举例来说,在无人机系统中,感知是非常重要的一种能力,它能够帮助无人机去识别环境中的元素,并分辨障碍物的真假(比如说门和阴影)。通过微软提供的软件,开发者可以开发无人机系统的感知能力。
同样的,这个平台还能帮助开发者为无人机制定飞行规划,也就是告诉无人机在何种情况下该如何反应,就像行人在远远地看到汽车时会调整路线一样。

实际上,整个平台的构建不仅仅是为了无人机,也包括任何种类的自动系统。平台负责人 Kapoor 表示,他甚至能够利用相同的代码去操纵汽车或者滑翔机。
机器人技术的民主化
为了推出整个平台,微软的研究员已经投入了将近一年的时间,但是他们已经在计算机视觉、机器人技术、机器学习和规划等技术上已经有数十年的经验。
根据 Kapoor 的说法,他们能够获得如此快速的进展,部分得益于微软研究所的独特结构,它能够让拥有不同技术背景研究员们快速地协作起来。

Microsoft Research
而他们之所以决定将这个平台开源,主要还是希望借此推动整个人工智能技术研究(尤其是自动化方面)的发展。因为很多机器人和人工智能的研究者们其实并没有时间和资源去开发自己的相关工具,也不具备实际的测试环境。
而且,这个平台不仅仅可以用于多数人所知道的无人机、机器人和自动驾驶汽车,也可以用于其他需要人为操作的系统。

在更长远的意义上,他们还希望通过这个平台,建立起关于人工智能自动化系统方面的一些基本规范协议。为此,Kapoor 还举了一个例子:目前在汽车驾驶领域,人们早就建立起一套完整的规范,来确定道路、是否避让行人、车速等,但在人工智能领域,类似的标准还没有。
图自:微软
按照这个项目的其中一个成员的说法:
我们想要的是机器人技术的民主化。





